17 Аналоговые электронные регуляторы.
Структурные схемы, методы формирования законов регулирования.
Регуляторы непрерывного
действия в зависимости от реализуемого закона регулирования подразделяются на
следующие типы:
интегральные
(астатические) — И - регуляторы;
пропорциональные
(статические) — П- регуляторы;
пропорционально-интегральные
(изодромные) — ПИ-регуляторы;
пропорционально -
дифференциальные — ПД- регуляторы;
пропорционально
-интегрально-дифференциальные — ПИД- регуляторы.
Интегральные (астатические) регуляторы. Интегральными, или астатическими,
называются такие регуляторы, у которых при отклонении регулируемого
параметра от заданного значения регулирующий орган будет перемещаться до тех
пор, пока регулируемый параметр не вернется к заданному значению. Такой
регулятор и представляет собой интегрирующее звено, передаточная функция
которого:
![]()
|
|
Структурная схема И
-регулятора представляет собой последовательно включенные усилительное и
интегрирующее звенья (рис. 6.1, а). В качестве интегрирующего звена
используется обычно гидравлический сервопривод или электродвигатель
постоянного тока, скорость перемещения которого всегда пропорциональна
величине отклонения регулируемого параметра от заданного значения.
Динамическая характеристика И -регулятора имеет вид, изображенный на рис.
6.1.б. И -регулятор
достаточно точно поддерживает заданное значение регулируемого параметра,
процесс регулирования протекает сравнительно медленно; поэтому он
используется в объектах с большим самовыравниванием, с незначительным
запаздыванием и с малыми по величине возмущениями. |
Пропорциональные
(статические) регуляторы.
У пропорционального
регулятора скорость перемещения регулирующего органа пропорциональна скорости
изменения регулируемого параметра.
Равновесие П -регулятора
возможно при различных значениях регулируемого параметра, вследствие чего
регулируемый параметр не поддерживается на заданном значении, а принимает
различные установившиеся значения.
|
|
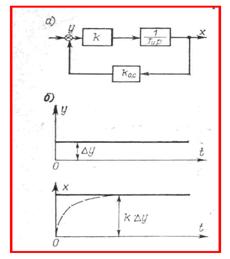
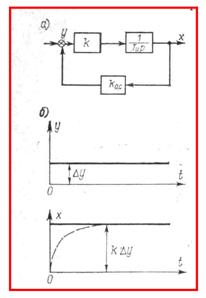
Структурная схема П -регулятора
представляет собой усилительное звено и может быть представлена в виде двух
звеньев, соединенных последовательно (рис. 6.2, а). Первое звено с
коэффициентом усиления 1г является усилительным устройством, второе —
интегрирующим звеном с передаточной функцией
Для получения П -закона регулирования
звенья регулятора охватываются жесткой отрицательной обратной связью с
большим коэффициентом передачи R0. о; тогда |
Пример П -регулятора дан
на рис. 3.1. П -регуляторы используются для управления объектами при низком
самовыравнивании (или без него), при наличии запаздывания в объекте, а также
при значительных по величине возмущениях. Преимуществом П -регулятора является
его быстродействие, т. е. малое время переходного процесса, и высокая
устойчивость процесса регулирования. Основным недостатком П -регулятора является
наличие остаточного отклонения регулируемого параметра, что снижает точность
регулирования.
Пропорционально-интегральные (изодромные) регуляторы. Пропорционально-интегральные, или
изодромные, регуляторы характеризуются тем свойством, что при отклонении
регулирующей величины от заданного значения регулятор вначале перемешает
регулирующий орган пропорционально измеренному отклонению (как статический регулятор),
а затем при подходе регулируемой величины к заданному значению медленно доводит
ее до этого значения (как астатический регулятор). Такое регулирование
получается достаточно точным и быстродействующим.
Регулятор, действующий
на таком принципе, имеет название ПИ-регулятор; он представляет собой
как бы сочетание двух регуляторов — пропорционального и интегрального.
ПИ-регуляторы поддерживают регулируемую величину без статической ошибки и
обеспечивают более высокое качество регулирования, чем астатические регуляторы.
Действие обратной связи в ПИ-регуляторе не остается постоянным, как это было
при статическом регулировании, а с течением времени исчезает, что дает
возможность регулятору привести регулируемую величину к заданному значению.
Такая обратная связь называется изодромной. Изодромное регулирование
характеризуется наличием упругих и инерционных обратных связей. Характер
регулирования зависит в этом случае не только от характеристики регулятора, но
и от свойств обратной связи. Изодромная связь может быть применена как в
астатическом, так и в пропорциональном регуляторе.
Такой режим
регулирования называется пульсирующим. Характер пульсации меняется в
зависимости от значения регулируемой величины и параметров изодромной связи.
При выбранном значении времени изодрома Ти соотношение между
длительностью работы и остановки, а следовательно, и средняя скорость
исполнительного механизма зависят от величины и скорости отклонения регулируемой
величины..
|
|
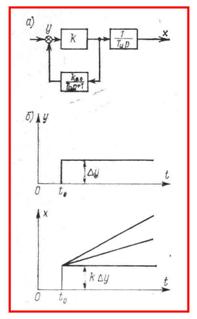
Динамическими
параметрами настройки являются передаточный коэффициент R и время
изодрома ТИ. ПИ-регулятор описывается уравнением, состоящим
из двух составляющих — пропорциональной и интегральной:
т. е. скорость
перемещения регулирующего органа пропорциональна отклонению и скорости
изменения регулируемого параметра Динамическая
характеристика изображена на рис. 6.4, б. При скачкообразном изменении
регулируемого параметра в момент tо регулирующий орган переместится на
величину Н Ау под действием пропорциональной составляющей. Затем под
действием интегральной составляющей регулирующий орган будет продолжать
перемещение в том же направлении с постоянной скоростью, называемой скоростью
изодрома, зависящей от выбранной величины Тb. ПИ-регуляторы
применяются в тех случаях, когда необходима большая точность регулирования и
быстродействие. |
Пропорционально
-интегрально -дифференциальные регуляторы.
ПИД -регуляторы
осуществляют закон регулирования, в котором скорость перемещения регулирующего
органа пропорциональна отклонению, скорости отклонения и ускорению отклонения
регулируемого параметра:
![]()
где R — коэффициент
передачи регулятора; TИ — время изодрома; Tn — время
предварения. Знак “плюс” или “минус” указывает на то, что предварение может
быть прямым или обратным. Таким образом, ПИД -регулятор имеет три параметра
настройки: R, TИ , Tn
|
Передаточная функция
регулятора
Предварение может
осуществляться как путем подключения на вход регулирующего прибора
чувствительных элементов, измеряющих скорость изменения регулирующей величины,
так и введением обратной связи. |
|
На рис. 6.5, б показана
динамическая характеристика обратной связи с предварением при скачкообразном
изменении сигнала на входе устройства. Из графика видно, что действие такой
обратной связи в первый момент времени замедленно, поэтому она получила название
запаздывающей обратной связи. Регулятор с предварением также может обеспечить
пульсирующий режим.
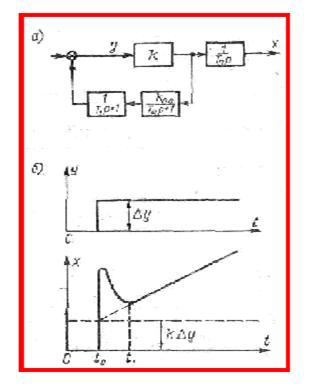
Структурная схема ПИД
-регулятора (рис. 6.6, а) получена путем введения в структурную схему
ПИ-регулятора звеньев, формирующих в законе регулирования составляющую,
пропорциональную производной изменения регулируемого параметра во
времени.
Временная характеристика
изображена на рис. 6.6, б. В интервале времени от t0 до t1
преобладают пропорциональная и дифференциальная составляющие, с момента
времени t1 преобладает пропорциональная и интегральная составляющие,
при этом характеристика имеет вид прямой, наклон которой определяется настройкой
времени изодрома Тк.
 Параметры настройки Ъ, Тж и
Т„ выбираются, исходя из параметров
Параметры настройки Ъ, Тж и
Т„ выбираются, исходя из параметров
объекта. ПИД -регуляторы сложнее в настройке, чем другие регуляторы, однако
могут обеспечивать более высокое динамическое качество систем регулирования.
Подобные регуляторы применяют при относительно инерционных (с большими
постоянными времени) объектах регулирования в целях повышения скорости и
точности регулирования.
На рис. 6.7 для
сравнения приведены характеристики П-, И-, ПИ -и ПИД -регуляторов. На входе
регуляторов приложено скачкообразное изменение возмущающего воздействия, объект
для всех регуляторов один и тот же. Показано, как изменяется регулируемая
величина во всех случаях, а также при отсутствии регулятора. При П -регуляторе
в установившемся режиме остается некоторое отклонение регулируемой величины от
заданного значения, при И -регуляторе -это отклонение сводится к нулю; ПИ и ПИД
-регуляторы обеспечивают лучшее динамическое качество.